


Túneis, tubulações, cavernas e outras estruturas subterrâneas são ambientes comuns na indústria e em atividades como a mineração, que precisam passar por inspeção periódica. Com entradas e saídas limitadas, esses locais, chamados de ambientes confinados, podem oferecer riscos como incêndio, desabamento ou alagamento e, por isso, são considerados hostis para seres humanos.
Uma alternativa para aumentar a segurança nesse tipo de operação é o desenvolvimento de robôs capazes de explorar tais lugares. Esse foi o trabalho realizado pelo pesquisador Hector Azpúrua ao longo de seu doutorado no Programa de Pós-graduação em Ciência da Computação do Instituto de Ciências Exatas da UFMG (Icex). O estudo foi agraciado com o Prêmio Capes de Tese 2023, concedido pela Comissão de Aperfeiçoamento de Pessoal de Nível Superior.
Na tese, o pesquisador propõe um método de planejamento de caminhos em terrenos tridimensionais acidentados, que leva em consideração fatores como condições para atravessar os terrenos, distância e consumo de energia do robô. Esse planejamento inclui a elaboração de mapas com informações, como o custo de navegação de acordo com a escolha de determinado trajeto.
Testado em ambientes reais
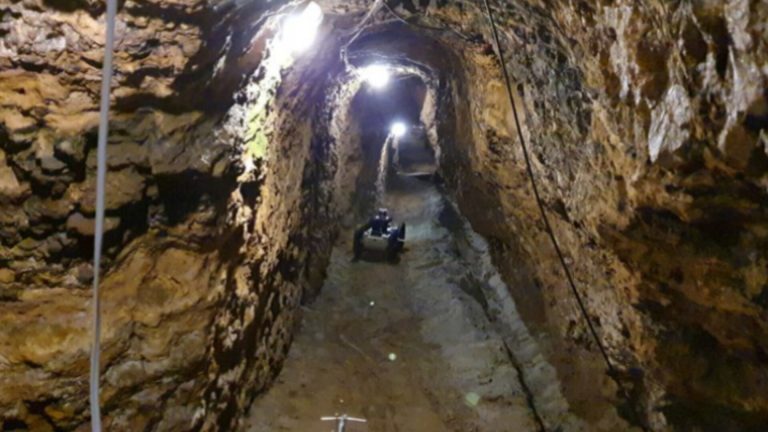
“O problema dos ambientes confinados industriais é que eles têm características que os fazem ser extremamente desafiadores para robôs. O ambiente tem desníveis, é escorregadio, não tem [sinal de] GPS, que é uma situação particularmente complicada para robôs móveis”, relata o autor da pesquisa. Os robôs passaram por testes em ambientes reais: a Mina Du Veloso, remanescente do período colonial, no município de Ouro Preto, e algumas instalações da Escola de Engenharia da UFMG.
A pesquisa foi desenvolvida em parceria com o Instituto Tecnológico Vale, da mineradora Vale, sob orientação do professor Douglas Guimarães Macharet e coorientação do professor Mário Fernando Montenegro Campos, ambos do Departamento de Ciência da Computação (DCC) da UFMG.



